
“I have always had a passion for tinkering and finding out what makes things ‘tick’. So when it came time to choose what to study, this, combined with my love for programming and all things electronic, led me to Electrical and Electronic Engineering,” explains Dr Clint Lombard who received his PhD degree in Electronic Engineering from Stellenbosch University earlier this year.
Although he hails from Gauteng, Stellenbosch University was at the top of his list for his engineering studies. “When I first visited Stellenbosch in Grade 11 when choosing universities, I immediately fell in love with the campus. I’m originally from Johannesburg, but haven’t left the Western Cape since I came down here to study 10 years ago.”
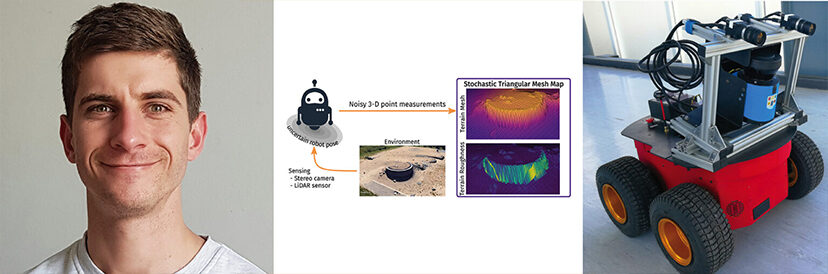
Dr Lombard’s topic for his PhD was Stochastic Triangular Mesh Mapping (constructing terrain maps for autonomous robots from stereo vision and laser scanner data). His decision to select this particular topic stemmed from his good working relationship with his final-year supervisor, Dr Corné van Daalen. He elaborates: “My undergraduate project was with Dr Van Daalen and we worked well together. I always wanted to go into robotics (my undergraduate specialisation was in robotics), and Dr Van Daalen had interesting robotics topics. We both enjoy the theoretical aspects of robotics, which also made it a good match. My PhD project was to design a new way of mapping a robot’s surroundings in 3D. This would enable the robot to navigate in unexplored environments.”
Dr Lombard is working and enjoys his job thoroughly. “I am working for a start-up called 42air. We are working on an autonomous drone delivery system for maritime applications and I am loving the work I am doing now. I am going to put my all into it, and see where it takes me. I love the field of robotics, it is so diverse with so many unsolved problems, which I’d like to contribute to some more.”
He is fortunate that he can continue with his work during the Covid-19 lockdown. He concludes: “I am very lucky that my job is all remote, so I have still been able to work.”
Title: Stochastic Triangular Mesh Mapping (constructing terrain maps for autonomous robots from stereo vision and laser scanner data).
Summary: For a mobile robot to operate autonomously in general environments, it must be able to perceive, or map, its surroundings. In order to address shortcomings in existing mapping techniques, this study proposes the stochastic triangular mesh mapping technique – a novel probabilistic surface representation that can be efficiently and incrementally updated using a new inference algorithm. It demonstrated the efficacy of the map on both simulated and practical data, showing that the map is superior to comparable techniques. It further demonstrated that maps constructed in landmark-relative submaps are more accurate than maps using a global reference frame.
Photographs from the left:
- Dr Clint Lombard. 2. His graphical abstract. 3. A picture of the Electronic Systems Laboratory’s Rooibot robotic platform which he used for data collection.